

自主移动机器人
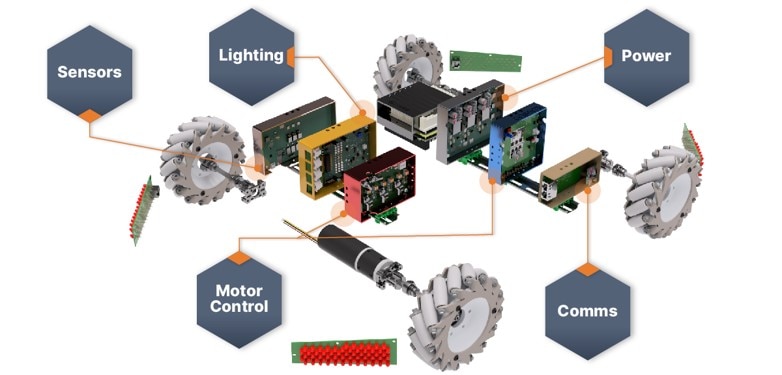
onsemi 自主移动机器人概念是一个综合的机器人解决方案,设计采用了 onsemi 的高效、创新解决方案。通过结合 onsemi 的不同智能和动力解决方案,该概念可用于设计各种类型的机器人、协作机器人、电动工具和自动导引车。
- BLDC 电机控制套件
- 电池充电和功率转换
- 图像传感器和激光雷达解决方案
- 连接解决方案
- LED 照明
- 工业协作机器人和机器人
- 仓库机器人
- 送货机器人
- 电动工具
- 农业机器人
- 割草机
- 自主导引车

自主移动机器人视频 -

2024 嵌入式世界访谈 -

畅谈技术:机器人技术和物理人工智能 -
- BLDC 电机控制解决方案
- 感测解决方案
- 电源解决方案
- 照明解决方案
- 通讯解决方案
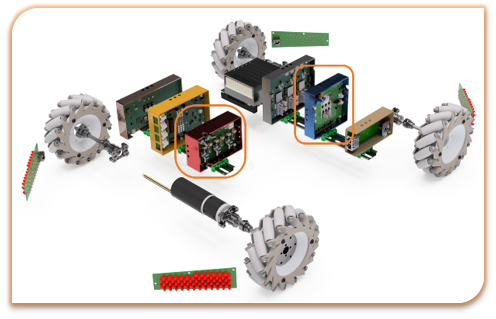
BLDC 电机控制解决方案
首先,我们有 BLDC 电机控制解决方案,实际上我们可以选择三个不同的平台。第一个是我们基于 ecospin 的集成电机开发平台。这是用于电机 BLDC 控制的完全集成解决方案。它具有集成自举二极管。以及感应放大器和栅极驱动器以及微控制器。提供有固件。
第二种解决方案是基于 Xilinx 的系统,该系统使用分立栅极驱动器和 MOSFET。它可用于需要更多电机控制级别计算能力的平台。
最后,我们有一个基于电动工具的解决方案。
精选产品




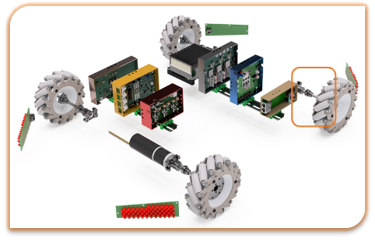
感测解决方案
自主机器人需要知道它要去哪里:因此它需要图像传感器和摄像头模块。我们的演示使用 E-con USB 摄像头模块。它使用全局快门图像传感器,非常适合自主机器人。全局快门传感器同时存储每个图像中的像素数据。这些类型的传感器不存在卷帘快门传感器中出现的运动伪影,因此非常适合在工厂或仓库地板上移动时使用。卷帘快门传感器比全局快门传感器具有更高的动态范围,因此在光照条件存在极大差异的情况下可以更好地工作。然而,对于在工厂工作的自主机器人来说,照明条件适合使用全局快门传感器。AR0234CS 图像传感器支持每秒六十帧的全高清图像。
具有可移动手臂的自主机器人使用伺服电机来控制手臂和抓取器的位置。这需要准确的位置反馈。此外,如果自主机器人断电然后再次打开,了解手臂的准确位置非常重要。绝对位置传感器可以随时确定手臂的位置。光学传感器可以做到这一点,但它们需要大量外部元器件,并且对温度变化很敏感。onsemi 是汽车市场高可靠性定制位置传感器的知名供应商。根据这一经验,我们开发了一种使用 NCS32100 传感器控制器的双感应式位置传感器解决方案。我稍后将在本演示中详细介绍该产品。
精选产品






电源解决方案
现在让我们看看自主机器人的电源。当然,它是由电池断电的,但电池在某个时候需要充电。自主机器人具有驾驶到充电点的能力。外部机器人手臂将电源线连接到自主机器人,为机器人充电。
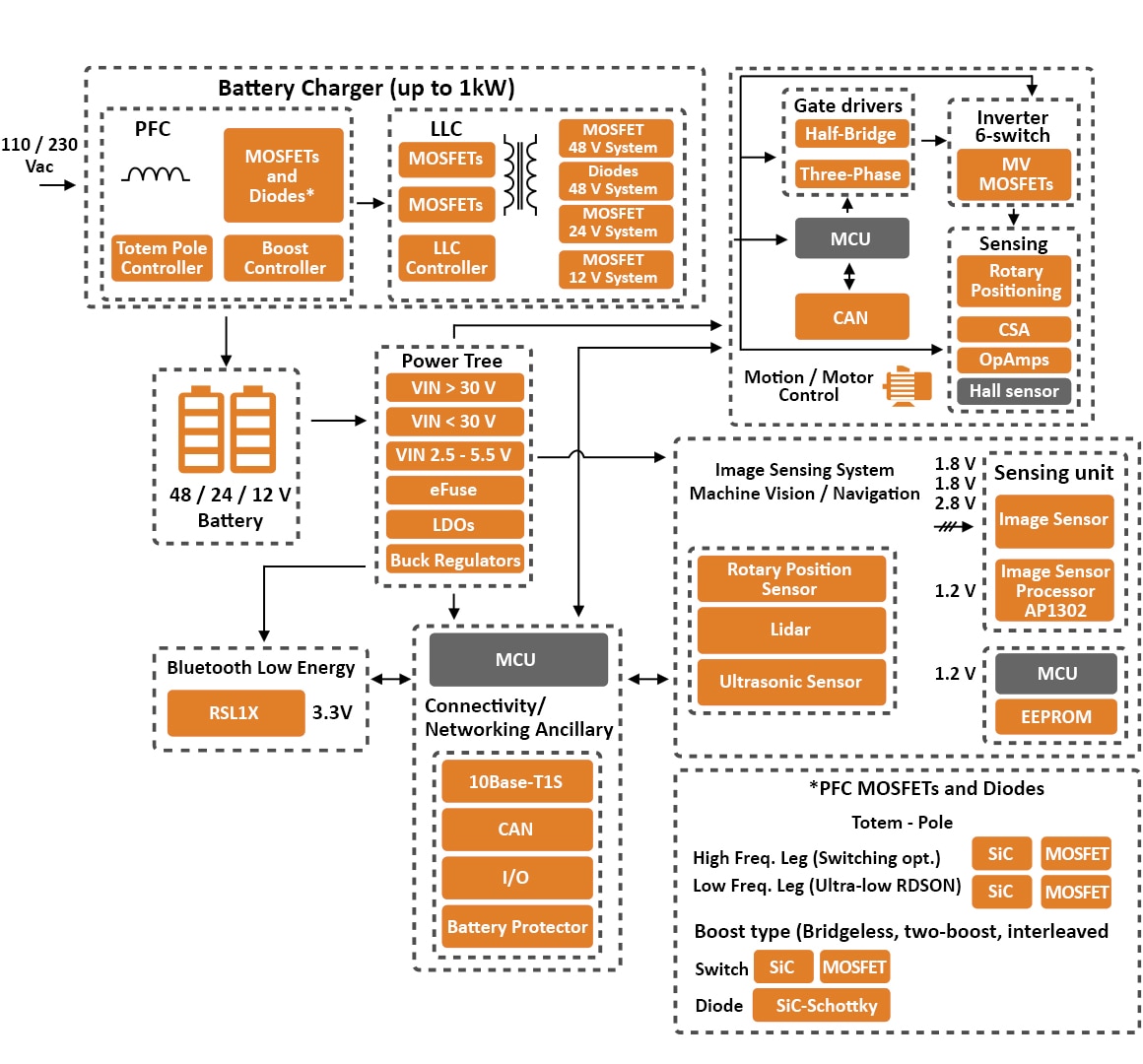
用于自主机器人的 600W 交流电源输入电池充电器由三部分组成:PFC 级、隔离式 LLC 转换器和降压转换器。PFC 级是使用 NCP1632 PFC 控制器的双交错式 PFC 级。这确保了从交流线路汲取的功率具有良好的功率因数和较低的总谐波失真。LLC 级使用带有中心抽头半桥拓扑的 LLC 拓扑将 PFC 级的输出(例如 400VDC)转换为 48V DC 输出电压。当前设计使用 NCP1399,较新的设计建议使用更先进的 NCP13994。使用由两个 NCP4305D 同步整流控制器控制的两个 FDMS86202ET 中压 MOSFET 对输出进行同步整流。
电池充电配置包括恒流充电模式,可产生较宽的工作电压范围。LLC 级的电压转换比或增益工作范围很窄,因此它们在恒流模式下工作不佳。在自主机器人充电器中,有一个使用 FAN65008 的第三个降压级,它可以在非常宽的电压转换比范围内运行,因此可以轻松提供电池充电所需的电流和电压曲线。
精选产品

 驱动器通用功率 MOSFET 10-DFN (4x4)")

 291W (Tc) 通孔 TO-247-3")





、102A (Tc) 3.3W (Ta)、187W (Tc) 表面贴装 8-PQFN (5x6)")

照明解决方案
我们的自主机器人解决方案配备 LED 灯,向人类和其他机器人展示其存在。额外的 LED 灯用于发出信号。onsemi 是一家为汽车和工业车辆市场提供前灯、尾灯、日间行车灯和信号灯解决方案的知名供应商。我们从这个广泛的产品组合中选择了两种产品用于我们的自主机器人。
NCV7685 汽车尾部 LED 灯解决方案是驱动器 + 集成 MOSFET 解决方案,使用简单。有 12 个并行 60mA 通道,通过 I2C 接口进行 PWM 控制。如果设计人员想要在没有外部微控制器的情况下操作 LED 驱动器,他们可以对特定的 OTP 寄存器进行预编程来设置占空比。LED 驱动器具有故障诊断功能,可由微控制器读回,以检测特定错误,例如设置电流的引脚上的短路情况、I2C 通信中的错误、热警告、热关断和开路负载情况。微控制器可以使用该信息来支持必要的纠正措施,例如将错误传达回监视本地自主机器人的中央主机控制器。
精选产品

NCV7685DQR2G
查看详情
通讯解决方案
通常,机器人供应商选择汽车 CAN 协议来实现机器人内部不同节点之间的有线通信,包括 BLDC、照明、处理器和一些传感器。CAN 已存在数十年,采用多点或菊花链拓扑结构的轻型且廉价的非屏蔽双绞线 (UTP) 接线,可实现节点之间 2 mbps 至 5 mbps 的通信。与此同时,随着机器人拥有更多的自主权,或者与人类更加和谐地工作,机器人智能需要得到增强。可通过在机器人上添加更多处理和传感器来增强机器人智能,包括激光雷达、图像传感器、超声波、雷达和感应定位。图像传感器和激光雷达正在推动更多点对点 (p2p) 通信链路到需要更快数据速率的处理器节点,如千兆以太网。CAN 的一个缺点是需要以太网和 CAN 之间的网关,因为协议不同。
2019 年,以太网联盟批准了 10BASE-T1S 的 IEEE802.3cg 标准,作为“全以太网” CAN 的替代品。现在,使用 10BASE-T1S,您可以在相同的两根电线(SPE:单对以太网)上以比 CAN 快 2 到 3 倍的速度进行通信,并使用 onsemi 的 NCN26010 或 NCN26000 控制器避免增加的网关成本和重量。











